


D_Turner
-
Posts
5 -
Joined
-
Last visited
-
Days Won
1
Content Type
Shop Talk
Gallery
Marketplace
Downloads
Articles
Completed Projects Database
Blogs
Events
Profiles
Project Comments posted by D_Turner
-
-
Yes the sensors lay inside the bag. They are heavy so they will always stay at the bottom and designed to function submerged. As long as your bag repeats in how it takes shape each time, the height of the water in the bag should be fairly repeatable. My Sumo bags fill the same each time from the best I can tell. I have engine dividers and and then the inside of the hull containing the bag sides so when it fills with water, I think the bag shape is VERY similar each time they fill.
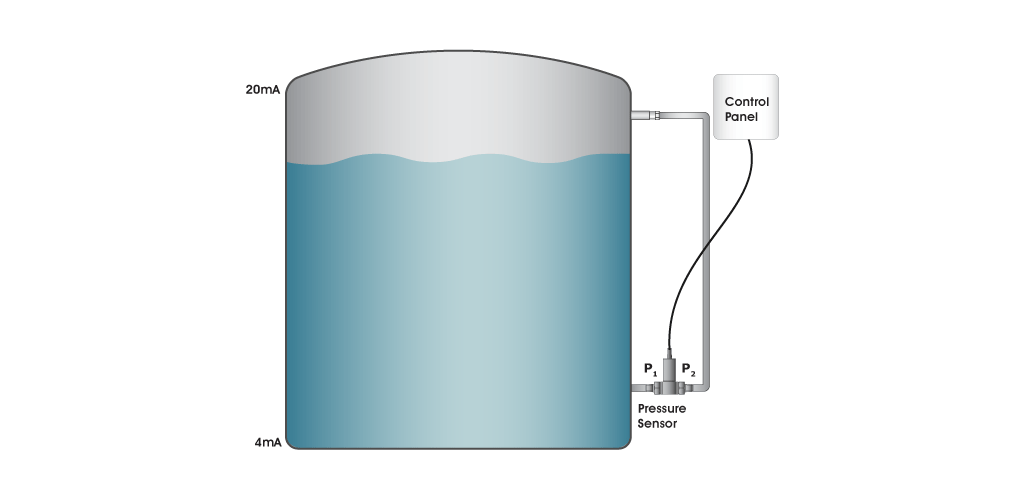
The sensor just measures water pressure. The deeper the water, the higher the water pressure. A varying current is created from this pressure measurement. You use this current measurement to make a water level reading.
Example: http://www.pvl.co.uk/user/Animations/Hydrostatic.jpg
You can do an external sensor which can be much cheaper, but requires more plumbing which I wanted to avoid. Similar to this: http://www.te.com/content/dam/te-com/images/sensors/global/infographics/differential-transducers-on-tank.png
The sensor I am using is 0-1.5 psi range so it will measure just over 3 ft water depths before maxing out. My bags are only right at 2ft tall filled.
As for the screen designs, let me get it all functioning first then I may play around with other designs. Once it is up and going it will just be a 'firmware' update to the Arduino to change it. I thought trying to replicate the stock Malibu screen and colors look would be cool, but probably overkill.
My LCD enclosure is supposed to ship this Friday from the 3D Printer so I hope to get that tested out next week and see if any changes need to be made to it.
{kind=link}
{kind=link}
Ballast Bag Level Monitoring
-
-
-
-
-
in Ballast Projects
Posted · Edited by D_Turner
Updated the project with the LCD box (above)